




TF Mini LiDAR (ToF) Laser Range Sensor - DFRobot
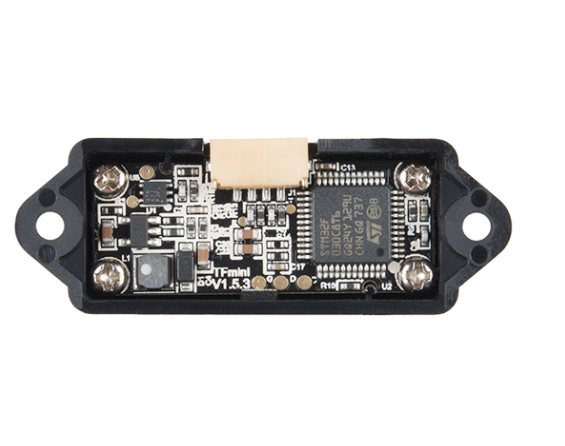
TF Mini LiDAR (ToF) Laser Range Sensorproduct ofToF (time of flight)It is one of the distance sensors working with the principle. The laser sensor can be used as a distance measuring instrument or a robot's eye to detect the distance to obstacles; The robot provides distance information for safe avoidance and route selection. Supports system automation in various machine control scenarios. Due to its small size, light weight and low power consumption, it is also suitable for quad-copy and field tracking, which is kept at an altitude.
ToF Sensors work differently than other distance measurement sensors. Distance Measuring Sensors consist of an IR sender and an IR receiver. The IR rays sent by the sender hit the obstacle and reflect on the receiver. The distance is determined according to the angle of the beam coming to the receiver. However, such sensors cannot detect black objects precisely. Since the black color does not reflect light properly, the receiver has difficulty in calculating the angle.
ToF, or time of flight sensors measure the distance by calculating the time photons spend in the air. It measures how long the photons fly before the laser light leaves the sender and reaches the receiver and calculates the distance between them. Thus, it gives more accurate results than other sensors.
The maximum detection distance of TF Mini is 12 meters, support 100Hz sampling resolution at 6 meters. The signal is immune to interference and is suitable for outdoor use.
TF Mini LiDAR uses UART (TTL) communication interface, it operates standard 5V and average power consumption is 0.6w. It is compatible with a variety of Arduino controllers. The DFRobot Gravity IO Expansion Shield can be attached to Arduino directly without additional wiring.
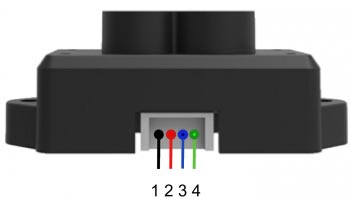
| Label | Name | Function |
| Black | GND | - |
| Rejection | VCC | + |
| Blue | TXD | Transmit Data |
| Green | RXD | Receive Data |
TF Mini LiDAR (ToF) Laser Range Sensor - DFRobot Technical Specifications
- Voltage Range: 4.5 V-6 V
- Communication Interface: UART (TTL)
- Working range: 0.3m-12m (closed)
- Maximum Reflectance Range: 10% - 5m
- Average power: 0.6w
- Acceptance angle: 2.3 °
- Minimum Resolution: 5mm
- Refresh Frequency: 100Hz
- Varying Accuracy: 1% (<6m),% 2 (6 ~ 12m)
- Changing unit: mm
- Band: 850nm
- Size: 42mm x15mm x16mm
- Working Temperature: 0 ° C / 60 ° C
- Storage Temperature: -20 ° C / 75 ° C
- Anti-light Environment: 70Klux
- Weight: 4.7g
Documents
- TF Mini LiDAR (ToF) Laser Range Sensor DatasheetCheck the file.
Useful Links
- Arduino Sensor TypesYou can examine.
- Distance and Motion SensorsYou can examine.
TF Mini LiDAR (ToF) Laser Range Sensor
- Features
- Payment Options
- Comments (0)
- Images
-
TF Mini LiDAR (ToF) Laser Range Sensor - DFRobot
TF Mini LiDAR (ToF) Laser Range Sensorproduct ofToF (time of flight)It is one of the distance sensors working with the principle. The laser sensor can be used as a distance measuring instrument or a robot's eye to detect the distance to obstacles; The robot provides distance information for safe avoidance and route selection. Supports system automation in various machine control scenarios. Due to its small size, light weight and low power consumption, it is also suitable for quad-copy and field tracking, which is kept at an altitude.
ToF Sensors work differently than other distance measurement sensors. Distance Measuring Sensors consist of an IR sender and an IR receiver. The IR rays sent by the sender hit the obstacle and reflect on the receiver. The distance is determined according to the angle of the beam coming to the receiver. However, such sensors cannot detect black objects precisely. Since the black color does not reflect light properly, the receiver has difficulty in calculating the angle.
ToF, or time of flight sensors measure the distance by calculating the time photons spend in the air. It measures how long the photons fly before the laser light leaves the sender and reaches the receiver and calculates the distance between them. Thus, it gives more accurate results than other sensors.
The maximum detection distance of TF Mini is 12 meters, support 100Hz sampling resolution at 6 meters. The signal is immune to interference and is suitable for outdoor use.
TF Mini LiDAR uses UART (TTL) communication interface, it operates standard 5V and average power consumption is 0.6w. It is compatible with a variety of Arduino controllers. The DFRobot Gravity IO Expansion Shield can be attached to Arduino directly without additional wiring.
Label Name Function Black GND - Rejection VCC + Blue TXD Transmit Data Green RXD Receive Data TF Mini LiDAR (ToF) Laser Range Sensor - DFRobot Technical Specifications
- Voltage Range: 4.5 V-6 V
- Communication Interface: UART (TTL)
- Working range: 0.3m-12m (closed)
- Maximum Reflectance Range: 10% - 5m
- Average power: 0.6w
- Acceptance angle: 2.3 °
- Minimum Resolution: 5mm
- Refresh Frequency: 100Hz
- Varying Accuracy: 1% (<6m),% 2 (6 ~ 12m)
- Changing unit: mm
- Band: 850nm
- Size: 42mm x15mm x16mm
- Working Temperature: 0 ° C / 60 ° C
- Storage Temperature: -20 ° C / 75 ° C
- Anti-light Environment: 70Klux
- Weight: 4.7g
Documents
- TF Mini LiDAR (ToF) Laser Range Sensor DatasheetCheck the file.
Useful Links
- Arduino Sensor TypesYou can examine.
- Distance and Motion SensorsYou can examine.
-
 95.64 TL + KDV
95.64 TL + KDV -
3,310.49 TL + KDV
-
4,965.73 TL + KDV
-
110.35 TL + KDV
-
239.09 TL + KDV
-
331.05 TL + KDV
-
Out of stock
24,828.66 TL + KDV
-
10,667.13 TL + KDV
-
4,597.90 TL + KDV
-
Out of stock
1,066.71 TL + KDV
-
Out of stock
1,066.71 TL + KDV
-
2,133.43 TL + KDV
-
2,758.74 TL + KDV
-
İNDİRİM
529.68 TL 295.74 TL + KDV
-
138.46 TL + KDV
-
367.83 TL + KDV
-
İNDİRİM
26,483.90 TL 20,304.33 TL + KDV
-
Out of stock
1,839.16 TL + KDV
-
YENİ
3,862.24 TL + KDV
-
7,172.72 TL + KDV
-
Out of stock
1,765.59 TL + KDV
-
13,793.70 TL + KDV
-
17,472.02 TL + KDV